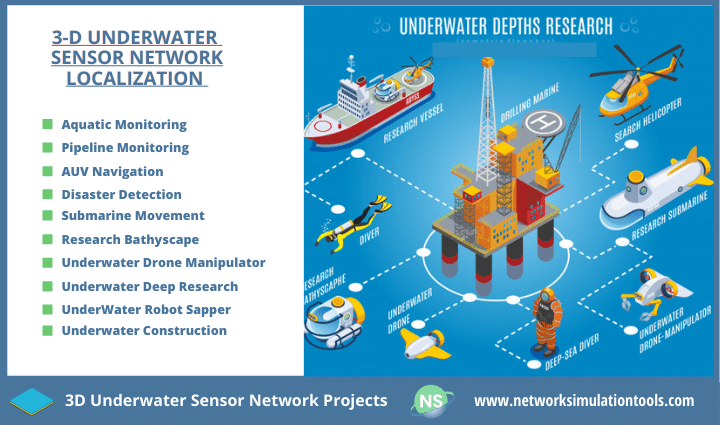
3D Underwater Sensor Network Projects learn with the marine world that is below sea level. In light of this area, the underwater wireless sensor network is UWSN; as the name says, this network is made up of many types of sensors. Without a doubt, each sensor senses as per their function.
To begin with, the network composes of sensors, sink, and autonomous underwater vehicle (AUV) and etc. In general, the sensors sense the surrounding and transmit it to AUV and then to sink. In case if the AUV is not present, then the data from one sensor reach sink through multiple hops.
At this point, the common problem in this UWSN is the high consumption of energy, and it happens due to the below reasons. Further, the drain of energy in sensor nodes leads to reduce nodes’ lifetime.
Above all, the sensors have only the amount of energy within which it processes. So that in order to mitigate the energy consumption, the 3D Underwater Sensor Network Projects are here.
To be clear, the AUV also reduces energy consumption, that is to say, AUV is not subject to the energy issue. Hence it revolves through a path at a certain sea level and gathers data from all the sensors and delivers it to the sink.
On the one hand, the sensors in this type of network allow data exchange via Magneto-Inductive, Radiofrequency, acoustic, and optical. While in each, the range of data rate and coverage differs. In contrast, the AUV has more extensive coverage than the sensors. Thus it is able to collect data from a far sensor too using ultra-wideband communication.
Among all the above, localization is important that identifies the position using signals. From the signals, the time, angle, or other measures gives the exact position of a node. We provide Artificial Neural Network thesis topics on current trends. To this point, the 4D-UWSN is the growth in which the AUVs are remotely accessible.
To this end, we are sure that you get enough points in this area. All of a sudden, you select your topic since soon it will become late even though we will not make things just like that. As soon as you come up with your area, we learn it and create new in it. So far, we run through all-new methods and hence select your zone once you see it.
| Technology | Ph.D | MS | M.Tech |
|---|---|---|---|
| NS2 | 75 | 117 | 95 |
| NS3 | 98 | 119 | 206 |
| OMNET++ | 103 | 95 | 87 |
| OPNET | 36 | 64 | 89 |
| QULANET | 30 | 76 | 60 |
| MININET | 71 | 62 | 74 |
| MATLAB | 96 | 185 | 180 |
| LTESIM | 38 | 32 | 16 |
| COOJA SIMULATOR | 35 | 67 | 28 |
| CONTIKI OS | 42 | 36 | 29 |
| GNS3 | 35 | 89 | 14 |
| NETSIM | 35 | 11 | 21 |
| EVE-NG | 4 | 8 | 9 |
| TRANS | 9 | 5 | 4 |
| PEERSIM | 8 | 8 | 12 |
| GLOMOSIM | 6 | 10 | 6 |
| RTOOL | 13 | 15 | 8 |
| KATHARA SHADOW | 9 | 8 | 9 |
| VNX and VNUML | 8 | 7 | 8 |
| WISTAR | 9 | 9 | 8 |
| CNET | 6 | 8 | 4 |
| ESCAPE | 8 | 7 | 9 |
| NETMIRAGE | 7 | 11 | 7 |
| BOSON NETSIM | 6 | 8 | 9 |
| VIRL | 9 | 9 | 8 |
| CISCO PACKET TRACER | 7 | 7 | 10 |
| SWAN | 9 | 19 | 5 |
| JAVASIM | 40 | 68 | 69 |
| SSFNET | 7 | 9 | 8 |
| TOSSIM | 5 | 7 | 4 |
| PSIM | 7 | 8 | 6 |
| PETRI NET | 4 | 6 | 4 |
| ONESIM | 5 | 10 | 5 |
| OPTISYSTEM | 32 | 64 | 24 |
| DIVERT | 4 | 9 | 8 |
| TINY OS | 19 | 27 | 17 |
| TRANS | 7 | 8 | 6 |
| OPENPANA | 8 | 9 | 9 |
| SECURE CRT | 7 | 8 | 7 |
| EXTENDSIM | 6 | 7 | 5 |
| CONSELF | 7 | 19 | 6 |
| ARENA | 5 | 12 | 9 |
| VENSIM | 8 | 10 | 7 |
| MARIONNET | 5 | 7 | 9 |
| NETKIT | 6 | 8 | 7 |
| GEOIP | 9 | 17 | 8 |
| REAL | 7 | 5 | 5 |
| NEST | 5 | 10 | 9 |
| PTOLEMY | 7 | 8 | 4 |